Controler deux servomoteurs (pan tilt) avec un nunchuk
1 Materiel:
-Un nunchuk




2 Construction
Reproduire le shéma :
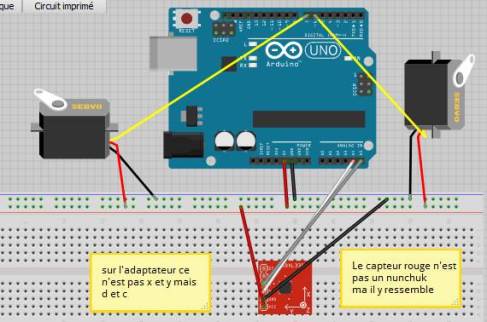
(Le d de l’adaptateur va sur analog4 et le c sur analog5)
(Le moteur du bas va sur Digital6 et celui du haut Digital7)
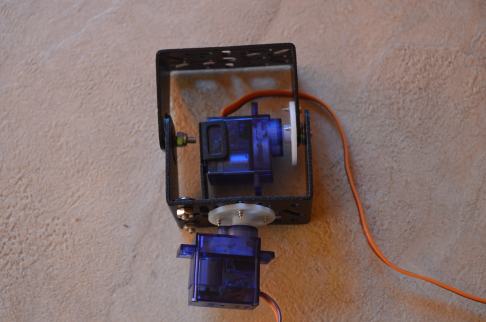
Vue réelle:

3 Programme
Si vous avez tout branché correctement copiez ceci dans votre environnement arduino:
#include <Wire.h>
#include <string.h>
#include <stdio.h>
uint8_t outbuf[6];
int cnt = 0;
int ledPin = 13;
int servoPin = 7;
int servoPin2 = 6;
int pulseWidth = 0;
int pulseWidth2 = 0;
long lastPulse = 0;
long lastPulse2 = 0;
int z_button = 0;
int c_button = 0;
int refreshTime = 20;
int minPulse = 1000;
int minPulse2 = 500;
int dtime=10;
#define pwbuffsize 10
long pwbuff[pwbuffsize];
long pwbuffpos = 0;
long pwbuff2[pwbuffsize];
long pwbuffpos2 = 0;
void setup()
{
Serial.begin (19200);
Wire.begin ();
nunchuck_init ();
pinMode(servoPin, OUTPUT);
pinMode(servoPin2, OUTPUT);
pulseWidth = minPulse;
pulseWidth2 = minPulse2;
Serial.print (« Finished setup\n »);
}
void nunchuck_init()
{
Wire.beginTransmission (0x52);
Wire.write (0x40);
Wire.write(0x00);
Wire.endTransmission ();
}
void send_zero()
{
Wire.beginTransmission (0x52);
Wire.write (0x00);
Wire.endTransmission ();
}
int t = 0;
void loop()
{
t++;
long last = millis();
if( t == 1) {
t = 0;
Wire.requestFrom (0x52, 6);
while (Wire.available ()) {
outbuf[cnt] = nunchuk_decode_byte (Wire.read
());
digitalWrite (ledPin, HIGH);
cnt++;
}
if (cnt >= 5) {
// printNunchuckData();
int z_button = 0;
int c_button = 0;
if ((outbuf[5] >> 0) & 1)
z_button = 1;
if ((outbuf[5] >> 1) & 1)
c_button = 1;
switch (c_button) {
case 1:
switch (z_button) {
case 0:
break;
case 1:
muovi();
break;
}
break;
case 0:
switch (z_button) {
case 0:
delay(10000);
break;
case 1:
delay(3000);
break;
}
break;
}
}
cnt = 0;
send_zero();
} // if(t==)
updateServo();
delay(dtime);
}
void updateServo() {
if (millis() – lastPulse >= refreshTime) {
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulseWidth);
digitalWrite(servoPin, LOW);
digitalWrite(servoPin2, HIGH);
delayMicroseconds(pulseWidth2);
digitalWrite(servoPin2, LOW);
lastPulse = millis();
}
}
int i=0;
void printNunchuckData()
{
int joy_x_axis = outbuf[0];
int joy_y_axis = outbuf[1];
int accel_x_axis = outbuf[2]; // * 2 * 2;
int accel_y_axis = outbuf[3]; // * 2 * 2;
int accel_z_axis = outbuf[4]; // * 2 * 2;
int z_button = 0;
int c_button = 0;
if ((outbuf[5] >> 0) & 1)
z_button = 1;
if ((outbuf[5] >> 1) & 1)
c_button = 1;
if ((outbuf[5] >> 2) & 1)
accel_x_axis += 2;
if ((outbuf[5] >> 3) & 1)
accel_x_axis += 1;
if ((outbuf[5] >> 4) & 1)
accel_y_axis += 2;
if ((outbuf[5] >> 5) & 1)
accel_y_axis += 1;
if ((outbuf[5] >> 6) & 1)
accel_z_axis += 2;
if ((outbuf[5] >> 7) & 1)
accel_z_axis += 1;
Serial.print (i,DEC);
Serial.print (« \t »);
Serial.print (« X: « );
Serial.print (joy_x_axis, DEC);
Serial.print (« \t »);
Serial.print (« Y: « );
Serial.print (joy_y_axis, DEC);
Serial.print (« \t »);
Serial.print (« AccX: « );
Serial.print (accel_x_axis, DEC);
Serial.print (« \t »);
Serial.print (« AccY: « );
Serial.print (accel_y_axis, DEC);
Serial.print (« \t »);
Serial.print (« AccZ: « );
Serial.print (accel_z_axis, DEC);
Serial.print (« \t »);
Serial.print (z_button, DEC);
Serial.print ( » « );
Serial.print (c_button, DEC);
Serial.print (« \r\n »);
i++;
}
char nunchuk_decode_byte (char x)
{
x = (x ^ 0x17) + 0x17;
return x;
}
void muovi (){
float tilt = (700 – outbuf[3]*2*2);
float tilt2 = outbuf[2]*2*2;
tilt = (tilt);
pulseWidth = (tilt * 5) + minPulse;
tilt2 = (tilt2-288);
pulseWidth2 = (tilt2 * 5) + minPulse2;
pwbuff[pwbuffpos] = pulseWidth;
pwbuff2[pwbuffpos2] = pulseWidth2;
if( ++pwbuffpos == pwbuffsize ) pwbuffpos = 0;
if( ++pwbuffpos2 == pwbuffsize ) pwbuffpos2 = 0;
pulseWidth=0;
pulseWidth2=0;
for( int p=0; p<pwbuffsize; p++ ){
pulseWidth += pwbuff[p];
pulseWidth2 += pwbuff2[p];
}
pulseWidth /= pwbuffsize;
pulseWidth2 /= pwbuffsize;
}
Maintenant branchez votre adaptadeur sur votre nunchuk (coté écrit adaptateur en face de coté creux sur nunchuk)
Téléversez votre programe et laissez votr arduino branchée a votre pc et bougez le nunchuk, apres esseyez d’apuyer sur les boutons c et z (si rien ne ce passe jamais réinitializez votre carte et sinon
contactez moi)
Sites pour le materiel:
pantilt: http://www.gotronic.fr/art-support-pan-tilt-dg2b-avec-servos-12404.htm
jumpers M-M: http://www.gotronic.fr/art-pack-de-65-cables-de-connexion-m-m-bbj2-18176.htm
jumpers F-M: http://www.gotronic.fr/art-pack-de-65-cables-de-connexion-m-f-bbj3-19402.htm
arduino: http://www.gotronic.fr/art-carte-arduino-uno-12420.htm
cable: http://www.gotronic.fr/art-cordon-2-5m-cw090b-15250.htm
breadboard: http://www.gotronic.fr/art-plaque-de-montage-rapide-17706.htm
Merci d’avoir lu ce tuto et a bientôt!